Multi-Modal Probabilistic Indoor Localization on a Smartphone
F. Dümbgen
C. Oeschger
M. Kolundzija
A. Scholefield
E. Girardin
J. Leuenberger
S. Ayer
International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2019
International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2019
One-sentence summary
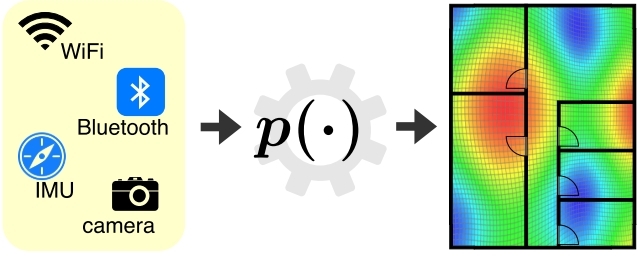
Combine Bluetooth signal-strength, WiFi round-trip-time measurements, and an IMU with an auto-calibration scheme whenever known landmarks are observed by the camera to obtain a location probability map of a smartphone's location in an indoor environment.
Abstract
The satellite-based Global Positioning System (GPS) provides robust localization on smartphones outdoors. In indoor environments, however, no system is close to achieving a similar level of ubiquity, with existing solutions offering different trade-offs in terms of accuracy, robustness and cost. In this paper, we develop a multi-modal positioning system, targeted at smartphones, which aims to get the best out of each of its constituent modalities. More precisely, we combine Bluetooth low energy (BLE) beacons, round-trip-time (RTT) enabled WiFi access points and the smartphone’s inertial measurement unit (IMU) to provide a cheap robust localization system that, unlike fingerprinting methods, requires no pre-training. To do this, we use a probabilistic algorithm based on a conditional random field (CRF). We show how to incorporate sparse visual information to improve the accuracy of our system, using pose estimation from pre-scanned visual landmarks, to calibrate the system online. Our method achieves an accuracy of around 2 meters on two realistic datasets, outperforming other distance-based localization approaches. We also compare our approach with an ultra-wideband (UWB) system. While we do not match the performance of UWB, our system is cheap, smartphone compatible and provides satisfactory performance for many applications.
[Paper]